
総合学術高等研究院(IMS)主任研究者
ヒトを含む周囲環境との柔軟な相互作用を実現するための力制御技術や、
鋭敏な力触覚の伝送・記録・再現を可能とするロボット制御技術などが得意。
大学院理工学府 数物・電子情報系理工学専攻
理工学部 数物・電子情報系学科 電子情報システム教育プログラム
総合学術高等研究院(IMS)主任研究者
研究概要
本研究室では、モータやロボットの運動を制御する技術(モーションコントロール技術)を基盤とし、特に医療福祉分野へのシステム応用研究を行っています。具体的には、鋭敏な力触覚を備えた医療デバイス・ロボットの開発や、医療システムへの応用を指向したアクチュエータの開発、ロボットを通して得られるヒトの動作データを利用した身体機能評価技術の開発などに取り組んでいます。
アドバンテージ
モーションコントロール技術の中でも、特にヒトを含む周囲環境との柔軟な相互作用を実現するための力制御技術や、鋭敏な力触覚の伝送・記録・再現を可能とするロボット制御技術などを得意としています。
事例紹介
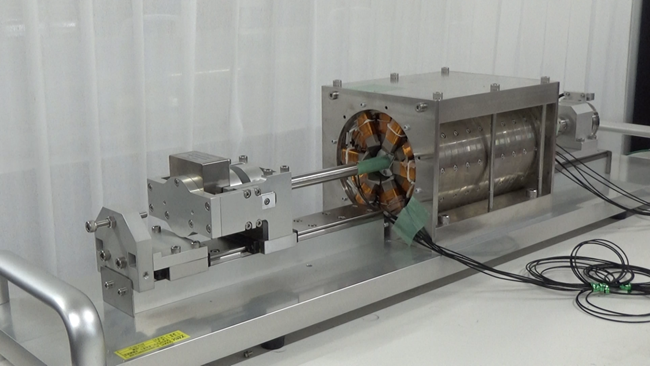
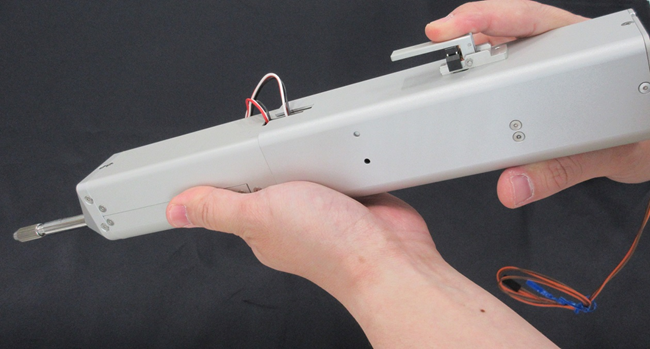
図は、科研費・基盤研究(B)の補助を得て試作した直動と回転の二つの運動を同時かつ独立に実現可能な円筒埋込磁石形二自由度モータ、神奈川県立産業技術総合研究所においてAMED・ACT-MSの補助を得て試作した脊椎貫通検知機能を有する整形外科用骨ドリル、に関する研究実績例を示しています。
主な所属学会
電気学会 / 日本ロボット学会 / 米国電気電子学会(IEEE)
主な論文
Minoru Yokoyama, Razvan Andrei Budau Petrea, Roberto Oboe, Tomoyuki Shimono,“External Force Estimation in Linear Series Elastic Actuator without Load-side Encoder,”IEEE Transactions on Industrial Electronics Vol. 68, No.1, pp. 861-870, 2021.
Minoru Yokoyama, Tomoyuki Shimono, Chikara Yamashita, Sei Nagasaka, Takuya Ohara,“Reduction of Contact Force Fluctuation for Rotary Wear Test Apparatus,”IEEE/ASME Transactions on Mechatronics, Vol.25,No.1,pp.185-194, 2020.Hiroshi Asai, Tomoyuki Shimono, Yasutaka Fujimoto, Takahiro Mizoguchi, Kouhei Ohnishi, “Mathematical Modeling of Semicircular Linear Motor Based on Vector Potential With Landen's Transformationm,”IEEE Transactions on Industry Applications,Vol.55, No.1,pp.437-447, 2019.
主な特許
特許5457900号「接触力制御方法及び接触力制御装置,並びに,集電装置」
特許6324755号「電磁アクチュエータ」
特許6756787号「筋力特性取得方法、及び、筋力特性取得装置」
特許6762280号「鉗子システム」特許6945201号「介護用補助装置」
特許6964293号「力触覚伝達システム, 力触覚伝達方法及びプログラム」
主な研究機器・設備
各種モータおよび医療デバイス・ロボット試作機
卓上型協働ロボットUR-3e
電磁界解析シミュレータ
主な地域活動(国内、特に神奈川県内)
神奈川県立産業技術総合研究所 次世代医療福祉ロボットグループ グループリーダー
一般財団法人 ハプティクス技術協会 理事