
ロボットやロボットシステムの知能化に関する研究に取り組んでいる。
理工学部 機械・材料・海洋系学科 機械工学EP
大学院理工学府 機械・材料・海洋系工学専攻
研究概要
当研究室では、ロボットおよびロボットシステムの知能化に関する研究に取り組んでいます。ロボットに器用な物体ハンドリングを実現させるためのマニピュレーション技術の研究、ロボットをもっと簡単に使えるようにするための教示技術に関する研究、人間の手や手による作業のモデリングなどが主な柱です。学術的テーマと産業的テーマのバランスをとって研究を進めており、産学連携のご提案については大いに歓迎いたします。
アドバンテージ
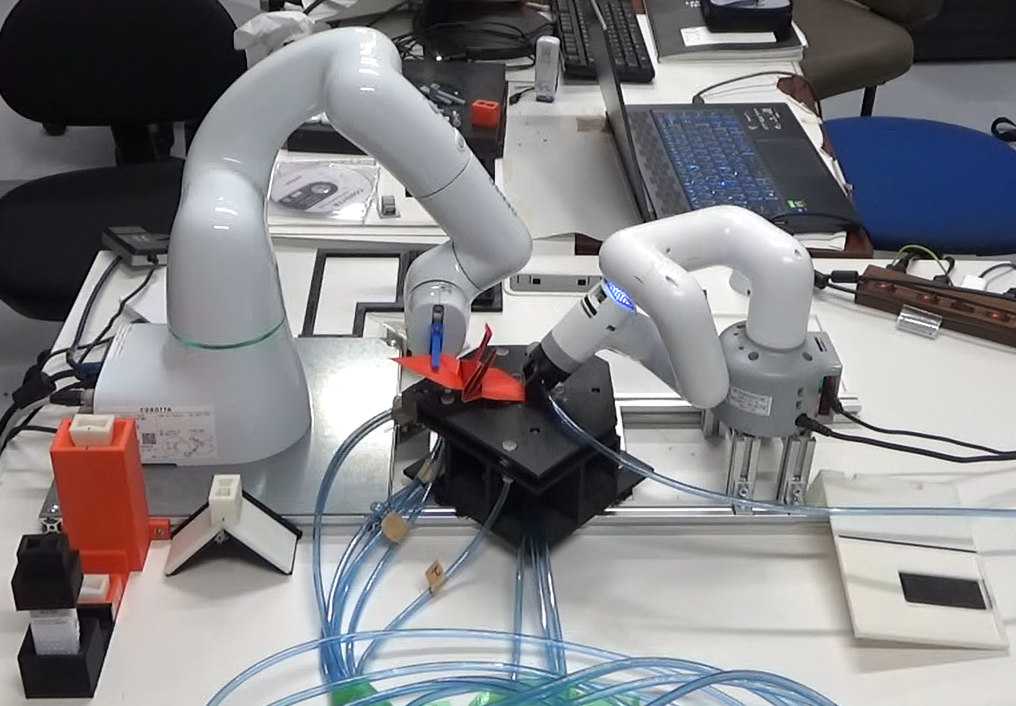
マニピュレーション技術、画像処理技術、動作計画技術、最適化技術などを統合的に用いた知能化ロボットシステムの構築を実現しています。
事例紹介
ロボットによる柔軟物ハンドリングの一例として,折り鶴の自動化を実現しました.
主な所属学会
日本ロボット学会 / 日本機械学会 / 米国電気電子学会(IEEE)
主な論文
『Simultaneous kinematic calibration, localization, and mapping (SKCLAM)for industrial robot manipulators』 「Advanced Robotics 33-23」2019
『Caging-based grasping of deformable objects for geometry-based robotic manipulation』「Robomech Journal 6-1」2019
『Robotic Additive Manufacturing with Toy Blocks』「IISE Transactions 53-3」2021
主な特許
特許第6150386号「ロボット教示方法」
特許第6052871号「対象物移動装置、方法、プログラム、及び記録媒体」
特許第5963262号「対象物移動装置、方法、プログラム、及び記録媒体」
主な著書
『ロボット工学ハンドブック第3版』 コロナ社 2023 (分担執筆)
『Robotic Microassembly』 Wiley-IEEE Press 2010 (分担執筆)
『ホロニック生産システム―人・機械・システムが柔軟に「協調」する次世代のモノづくり』 日本プラントメンテナンス協会 2004(分担執筆)