
臨床評価を一研究室で行える。国内の多くの医学系研究機関と連携し、
医用福祉・リハビリのための支援システムの開発が可能である。
大学院理工学府 機械・材料・海洋系工学専攻
理工学部 機械・材料・海洋系学科専攻
研究概要
上肢欠損者の運動機能を代替する筋電義手や手指麻痺リハビリのための外骨格型パワーアシスト装置など、人とロボットの融合学問(Cyber-Robotics)の医療・福祉・リハビリ・産業応用に関する研究に取り組んでいます。「ヒトに適合する身体機械とは何か?」という問題を工学的にアプローチし、身体の機能代替から機能拡張までを研究対象としています。
アドバンテージ
(1)人を傷つけずに計測可能な多種の非侵襲生体信号(脳波、筋電、眼電)やストレスマーカー(心電、皮膚電位、フリッカー)などから人の状態(運動、疲労、ストレス)を推定する機械学習手法をベースに、それらで制御される装着型ロボットや情報システムの研究開発をしており、センシングデバイス、信号処理、制御手法、ロボット設計・製作、臨床評価を一研究室で行えます。
(2)国内の多くの医学系研究機関と連携し、医用福祉・リハビリのための支援システムの開発が可能です。
事例紹介
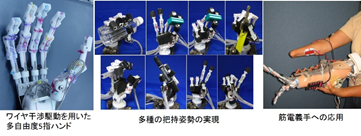
(1)多くの日常生活動作を可能にする筋電義手の開発
事故や病気などで腕を欠損した人のための義手の開発を行っています。上腕断端部の皮膚表面から筋電を計測し、手指や肘動作の動作意図を機械学習により推定し、ロボットハンドを制御します。前腕切断では、前腕部3か所の筋電から15種類の動作の推定が可能です。また、人の筋腱構造を模擬することで少ないアクチュエータで力強く多くの関節を動かすことのできる機構の開発も行っています。
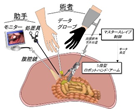
(2)5指ハンドを用いた腹腔鏡下手術支援システムの開発
大腸など小さい鉗子ではハンドリングが難しい大型臓器の腹腔鏡下手術のために、小さな切開創から挿入可能で、腹腔内で愛護的な手術操作の支援が可能なマスタースレイブ型5指ハンドを開発しています。これにより術時間と訓練期間の短縮が期待されています。




主な所属学会
日本ロボット学会 / 精密工学会 / 米国電気電子学会(IEEE)
主な論文
『基本把持機能を有する簡易型筋電義手の開発と評価』「知能と情報Vol.27(6)」2015.12
『時系列情報を用いた筋電パターン識別精度向上フィルタの提案』「生体医工学誌Vol.53(4)」2015.8
『生産システムにおける人間ロボット協調系の構築』「精密工学会誌Vol.78(3)」2011.3
『筋電義手使用による運動機能再建の評価』「日本ロボット学会誌Vol.27(8)」2009.8
主な特許
特許第4354388号「非定常波解析システム」
特許第5467267号「機器制御装置,機器システム,機器制御方法,機器制御プログラム,および記録媒体」
特許第5920805号「手指伸展運動支援装置」
主な研究機器・設備
電子回路基板加工機
3Dプリンター
主な地域活動(国内、特に神奈川県内)
さがみロボット産業特区重点プロジェクト「多くの日常生活動作を可能にする上肢筋電義手」
サイボーグを作ろう~世界最先端 人と機械の融合マシン技術[高校生向け公開(出張)講座](日本学術振興会「平成28年度ひらめき☆ときめきサイエンス推進賞」受賞)