
「固定型多軸ステージ」の特徴を併せ持つ技術を開発した。
理工学部 機械・材料・海洋系学科 機械工学EP
大学院理工学府 機械・材料・海洋系工学専攻 機械エ学
先進実践学環 応用AI、集積エレクトロニクスと社会展開
研究概要
現在の実装設備は、実装精度が高くなるにつれて大型化し、場所・エネルギーの損失が大きくなります。さら
に、品種変更の際の配置換えが困難であり、変量多品種に対する柔軟性に欠けています。本研究では「平面内の併進X・Yと回転θの3自由」を、独立かつ精密に動作可能な、5cm立方サイズのXYθ小型自走機械を複数台用いて、変量多品種、省スペース、低コスト、省エネルギー、低振動の特長をもつシステムを開発しています。
アドバンテージ
既存機器の隙間、チャンバー、事務机等の狭小スペースにて、容易に精密作業を実現できる小型かつ軽量、ホロノミック、精密なロボット技術を提供します。
用途に合わせてカスタマイズ対応いたします。
既存機器のオプション機能追加にも適します。
事例紹介
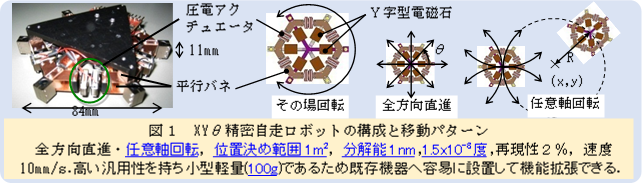
昆虫のように小型軽量(5cm3,100g)なXYθに独立に精密動作可能な小型自走ロボットを提案し、全方向への並進動作や任意点での回転動作を実現しています。
これまでに、開ループ制御では、動作補正により経路長に対し1%の位置決め誤差を実現し、閉ループ制御では、エンコーダを複数組み合わせたXYθ変位センサにより0.1μmの分解能でのXYθ軸の精密位置決め制御を実現しました。
小型ロボットに搭載する小型作業ツールでは、液架橋力により0.5mmサイズの柔軟かつ複雑な形状をもつ微小物を操作するマニピュレータを開発しています。また液中において振動ピペット近傍に発生する局所流動を用いて、柔軟かつ複雑形状をもつ細胞・微小部品を多軸かつ精密に操作する技術を開発しています。
主な所属学会
精密工学会 / ロボット学会 / 機械学会 / IEEE
主な論文
Satoshi Ando, Naoto Watanabe, Chihiro Sekine, Shogen Sekiguchi, Ohmi Fuchiwaki (2025), Autonomous Machine Learning-Based Classification and Arrangement of Submillimeter Objects Using a Capillary Force Gripper. Adv. Intell. Disc. 2500068.,https://doi.org/10.1002/aidi.202500068
Ryosuke Kinoshita, Rintaro Minegishi, Chihiro Sekine, Yohei Tsukui, Yuta Sunohara, Yuko Nishimura, Shogen Sekiguchi, Ohmi Fuchiwaki (2025), Untethered Autonomous Holonomic Mobile Micromanipulator for Operations in Isolated Confined Spaces. Adv. Intell. Syst. 2400872.,https://doi.org/10.1002/aisy.202400872, IF=7.4
Suzuki, M., Iida, Y., Tsukui, Y., Kusama, H., Kinoshita, R., Kusui, E., Sunohara, Y., Minegishi, R., Sugiyama, Y., Nishimura, Y., Sekine, C. and Fuchiwaki, O. (2024), Automatic Holonomic Mobile Micromanipulator for Submillimeter Objects Inspired by the Rhinoceros Beetle. Adv. Intell. Syst. 2300517.,https://doi.org/10.1002/aisy.202300517, IF=7.4
主な特許
特許第4660772号 米国特許7,726,210「検体動作制御装置、検体動作用のパラメータの取得方法、及び検体動作制御方法」
主な研究機器・設備
三次元モデリングマシン(Roland,MDX540、切削分解能1μm)
FPGA(NI、c-RIO)
垂直多関節ロボットアーム(EPSON、C4)