
人とテクノロジーが互いに理解し合うきっかけを研究しています
研究概要
私の研究テーマは:「愛」があるロボットとロボティクスです。私は、人に優しく寄り添い、困っている人を助けるロボットこそ、「愛があるロボット」だと考えています。ロボット自身に本当の感情はなくても、私たちがその行動に愛を投影し、温かさを感じる瞬間にこそ、不思議な共感と希望が生まれる。その感覚が、人とロボットが協働共生する未来の鍵になると感じ、なぜ行動だけでこんなに深い感情が芽生えるのか、その根底にある秘密を追い求めています。問いかけを通じて人々の価値観を揺さぶり、共に考える場を生み出すことも目指しています。この不思議を探ることで、人とテクノロジーが互いに理解し合うきっかけを作りたいのです。
アドバンテージ
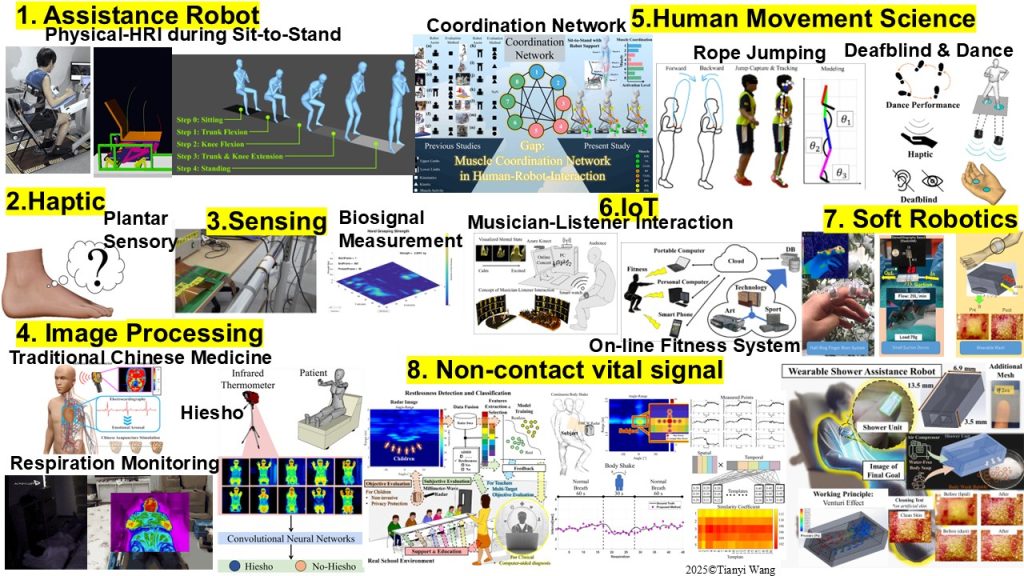
私の研究は「愛があるロボット」をキーワードに、重度障害患者の連続非侵襲的動脈圧測定から始まり、起立支援や生活支援ロボットとの動作協調性解析で寄り添う行動を定量化。柔軟圧力センサーシートや3軸加速度計、サーモグラフィに基づく機械学習で冷え症や睡眠段階、感情覚醒を見える化し、介護やオンラインフィットネスで安心感を創出。さらに、ビデオ色変化による自律神経応答解析やミリ波レーダーで子供の活動量計測、縄跳び動作のリアルタイムフィードバックなど、多様な手法を統合し、人が「愛」を感じるロボット行動の未来を切り拓いています。
事例紹介
1.生活支援ロボット評価のための人間の動作協調性の解析:起立動作を支援するロボットとユーザーの協調動作に着目し、ユーザーの上半身と下半身の相対位相を解析するより、新たな生活支援ロボットのサービスの評価方法を提案しました。起立支援ロボットのサービス評価手法:ロボットの起立支援サービスを受けるユーザーについて、床反力から対象者の圧力中心を計算し、機械学習の一種であるベイズ分類器を用いることで、サービスの質を定量化する手法を開発しました。
2.冷え症が足底の触覚感覚に影響を調査しました。冷え症が足底感覚機能に与える影響を実証した初の研究であり、姿勢制御や歩行安定性における冷え症の生理学的意味の理解に新たな視点を提供します。これらの知見は、女性特有の健康問題としての冷え症の病態生理解明および予防・治療法開発への基礎的エビデンスとして極めて重要です。
3.交通事故の主原因である運転者の不適切な操舵操作や居眠り運転の早期検知を目的とし、柔軟な圧力センサーシートを使用して手の握り方と心拍数を同時に測定する基本的な研究を提案しました。本技術は自動車工学と生体工学の融合領域において画期的な進歩を示し、インテリジェント車両システムへの実装可能性を実証しました。運転者状態のリアルタイム監視による交通安全向上への応用が期待され、次世代車載ヘルスモニタリングシステムの基盤技術として極めて重要な学術的貢献です。
4.鍼灸中の感情の覚醒を測定するための非侵襲的な手法を提案しました。冷え症を定量的かつ非侵襲的に判定する手法を開発しました。畳み込みニューラルネットワークによる冷え症の診断補助システムの開発:これまで主観的に診断されていた冷え症について、冷え症患者のサーモグラフィ画像を機械学習で処理することにより、客観的診断を可能にする補助システムを開発しました。
5.縄跳び運動中に慣性計測ユニット(IMU)を使用して連続的な調整運動を改善するためのリアルタイムフィードバックの指標を新たに開発しました。縄跳び動作の協調性に着目し、将来のオリンピック日本代表選手を目指している子供達の運動パフォーマンスを評価した。盲ろう者に芸術に伝わる手法を検討しました。
6.COVID-19の大流行中に、Online-Fitness System(Biosignal Art)の開発と評価を行いました。開発されたシステムにより、利用者の動作を自動採点し、その点数に合わせてオリジナル音楽を作成できる仕組みです。COVID-19の流行による緊急事態宣言下におけるオンラインフィットネスの利用者の運動に関する情報を世界で初めて報告しました。Smart-Watchを用いて、人がオンラインで音楽を聞いた時の感情を直感的にわかりやすく可視化することを世界で初めて提案しました。
7.世界初の「温かく柔らかい指装着型ウェアラブルロボット」と「入浴支援ウェアラブルシャワーロボットスーツ実現するために単一自由度で水搬送・泡作成する小型シャワーユニット」の開発に成功しました。
8.ミリ波レーダーを用いて子供の動きを識別し,活動量を計測するシステムを提案し、教育現場で提案システムの有効性を検証しました。連続的不規律の体動があっても,高精度で無接触の人間の生体信号(呼吸および心拍数)計測手法を提案しました。
主な所属学会
IEEE / 日本機械学会 / 看護理工学会
主な論文
[1 ] Tianyi Wang, et al., Fault classification with discriminantanalysis during sit-to-stand movement assisted by a nursing care robot, Mechanical Systems and Signal Processing113 90-101 2018
[2] Tianyi Wang, et al., Convolutional neural network-basedcomputer-aided diagnosis in Hiesho (cold sensation), Computers in Biology and Medicine, 2022
[3] Tianyi Wang, et al., Continuous body movement-robust respiration rate detection using Frequency-Modulated Continuous Wave millimeter wave radar based on non-negative matrix factorization algorithm, Biomedical Signal Processing and Control, Volume 102, 2025, 107243
主な著書
[1] Tianyi Wang, et al., Evaluation and Fault Classification for Service Robot during Sit- to-Stand Movement through Center of Mass, Service Robot, Edited by Antonio Jose Ribeiro Neves, INTECH.